AI 자전거 로봇이 공중제비를 배웠다 — 모터 5개, 가상세계 4만 번 훈련
23.5kg 자전거 로봇 UMV가 모터 5개만으로 시속 28km 주행, 1m 점프, 공중제비까지 해냅니다. AI 강화학습으로 가상세계에서 4만 번 넘어지며 익힌 동작을 실제 로봇에 바로 옮긴 제로샷 전이 기술의 원리를 분석합니다.
• 자율주행 AI 트럭 100대, 운전자 없이 광산 1년 운행 — 생산성 20% 향상
• 앱으로 예약하면 AI 로봇이 집 청소를 하러 온다 — 알리바바·바이트댄스가 3800억 원 투자한 중국의 실험
• 자율주행 건설 로봇 Bedrock Robotics, 3500억 원 투자 유치 — 엔비디아도 참여
AI 강화학습으로 훈련받은 자전거 로봇이 스스로 달리고, 점프하고, 공중에서 한 바퀴를 돌아 착지합니다. 사람이 타고 있지 않습니다. 모터 5개와 무게 23.5kg이 전부인 이 AI 로봇이 어떻게 이런 일을 할 수 있을까요? 비밀은 AI 강화학습(Reinforcement Learning) — AI가 가상세계에서 수만 번 시행착오를 거치며 스스로 동작을 익히는 기술에 있습니다.
UMV 자전거 로봇 — 모터 5개로 움직이는 AI의 몸체
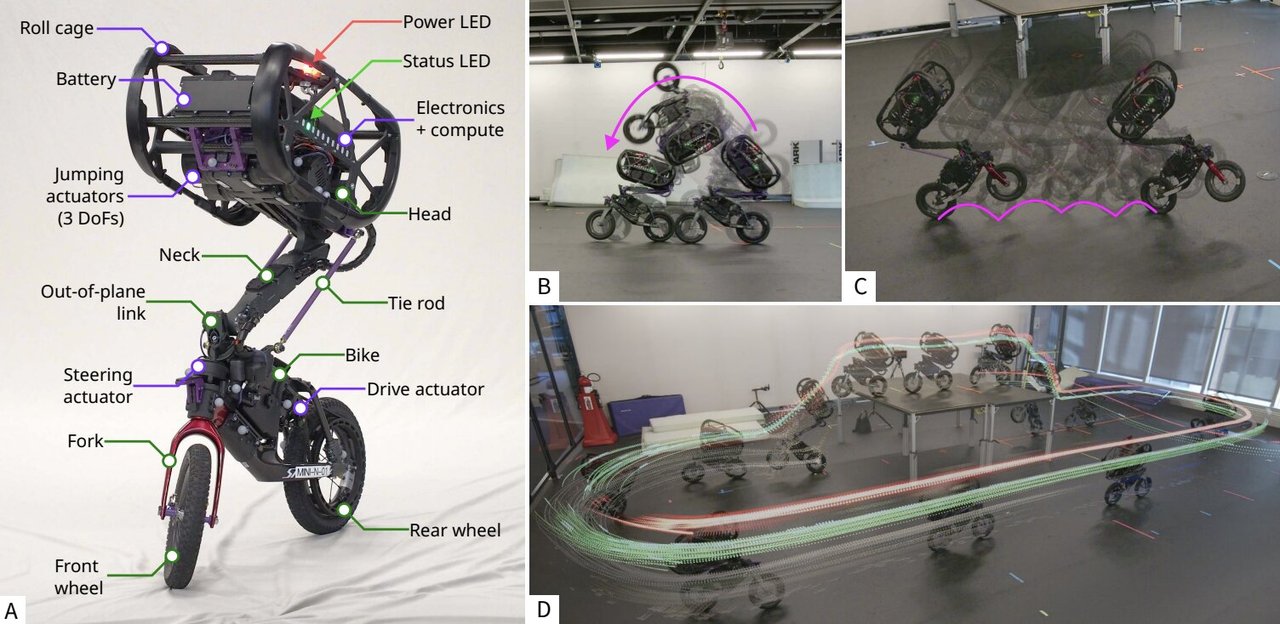
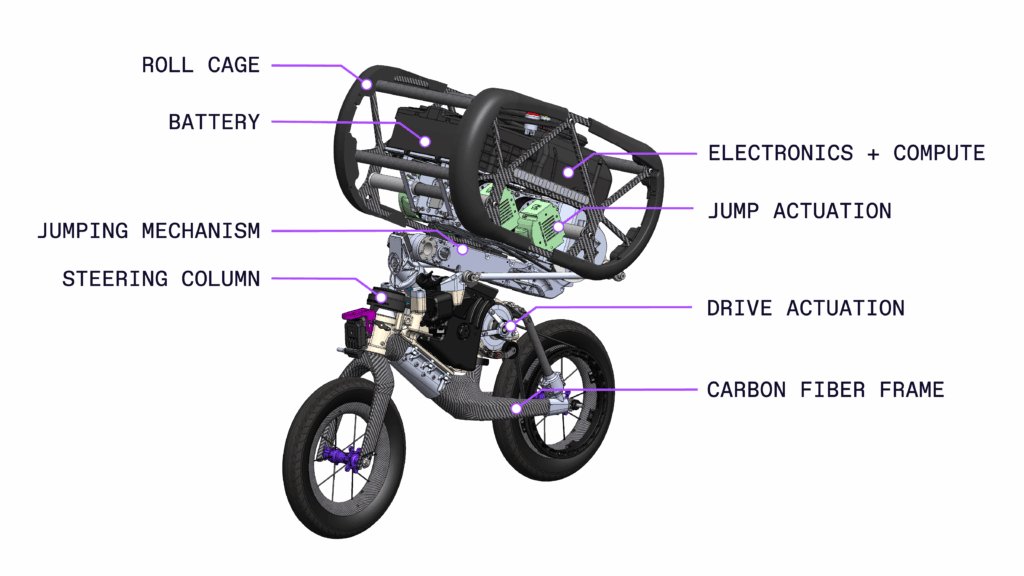
미국 매사추세츠주 캠브리지에 본사를 둔 RAI 연구소(Robotics and AI Institute)가 개발한 UMV(Ultra Mobility Vehicle)는 겉보기에는 어린이용 밸런스 자전거에 기계장치를 올려놓은 것처럼 생겼습니다. 하체는 탄소섬유 프레임(Specialized Hotwalk 밸런스 바이크 기반), 상체에는 배터리·컴퓨터·모터가 들어 있습니다.
핵심은 구동 장치가 단 5개라는 점입니다. 보통 두 발로 걷는 휴머노이드 로봇은 관절마다 모터가 수십 개 필요하지만, UMV는 바퀴 굴리기(1개), 방향 전환(1개), 점프·자세 제어(3개) — 이 다섯이 전부입니다. 부품이 적으니 고장 날 곳도 적고, 가격도 내릴 수 있습니다.
- 무게: 23.5 kg
- 최고 속도: 시속 28 km (8 m/s)
- 점프 높이: 1 m (자기 키의 130%)
- 구동 모터: 5개
- 최대 소비 전력: 4.5 kW (점프 순간)
- 프레임 소재: 탄소섬유 + 알루미늄 7075 + 마그네슘 합금
AI 강화학습 — 가상세계에서 4만 번 넘어진 뒤 현실에서 성공하다
UMV가 공중제비를 배운 방법이 더 흥미롭습니다. 연구팀은 NVIDIA Isaac Lab(로봇 훈련용 가상환경)에서 UMV의 디지털 쌍둥이를 만들어, AI가 스스로 동작을 연습하도록 했습니다. 이 과정을 강화학습(Reinforcement Learning)이라고 합니다 — 게임 캐릭터가 죽고 다시 시작하듯, 로봇이 넘어지고 다시 일어나기를 최대 4만 2천 번 반복합니다.
놀라운 점은 '제로샷 전이(zero-shot sim-to-real)'라는 기법입니다. 쉽게 말해, 가상세계에서 학습한 AI를 실제 로봇에 그대로 옮겼더니 추가 조정 없이 바로 동작했다는 뜻입니다. 현실의 바닥 마찰, 배터리 전압 변화, 바퀴 반발력 같은 변수를 가상세계에서 미리 랜덤으로 바꿔가며 훈련했기 때문입니다.
연구팀은 착지 성공 기준을 15회 연속 성공으로 잡았습니다. 이 기준을 통과한 AI만 실제 로봇에 탑재됩니다.
AI 로봇 UMV가 수행하는 6가지 스턴트
UMV가 시연한 동작들을 보면 BMX 선수 못지않습니다.
1. 트랙 스탠딩 — 제자리에서 넘어지지 않고 균형 잡기
2. 전후진 주행 — 시속 28km로 달리기, 뒤로도 달리기
3. 윌리 — 앞바퀴를 들고 달리기
4. 버니홉 — 두 바퀴를 동시에 들어 장애물 넘기
5. 1m 테이블 점프 — 높이 1m 플랫폼 위로 뛰어오르기
6. 프론트 플립 — 공중에서 앞으로 완전히 한 바퀴 회전 후 착지

왜 자전거 형태인가 — 단순한 하드웨어의 힘
로봇을 만들 때 가장 비싸고 복잡한 부분이 다리입니다. 보스턴 다이내믹스의 Atlas 같은 휴머노이드는 수십 개의 관절과 모터가 필요합니다. 반면 UMV는 바퀴라는 단순한 이동 수단에 최소한의 구동 장치만 추가했습니다.
RAI 연구소의 접근법은 명쾌합니다. 하드웨어를 단순하게 만들고, 복잡한 동작은 AI 소프트웨어에 맡기자. 모터 수를 줄이면 무게가 가벼워지고, 가벼우면 점프가 쉬워지고, 점프가 쉬우면 더 어려운 동작을 배울 수 있습니다. 실제로 UMV는 자기 키의 130% 높이를 점프합니다 — 사람으로 치면 2m 30cm를 뛰어넘는 셈입니다.
AI 로봇 활용 분야 — 배송, 험지 탐사, 시설 점검
연구팀은 UMV의 활용 가능성을 세 가지로 제시합니다.
도심 배송: 계단, 연석, 좁은 골목처럼 바퀴 달린 로봇이 가기 어려운 곳을 점프로 넘을 수 있습니다. 시속 28km면 자전거 배달원과 비슷한 속도입니다.
험지 이동: 재난 현장, 산악 지형 등 사람이 접근하기 어려운 곳에 물자를 실어 나를 수 있습니다.
좁은 공간 점검: 공장 배관, 건물 지하 등 사람이 들어가기 힘든 곳을 자전거 크기로 돌아다니며 점검할 수 있습니다.

보스턴 다이내믹스 Spot의 속도를 3배로 끌어올린 연구소
RAI 연구소는 이미 보스턴 다이내믹스의 4족 보행 로봇 Spot의 이동 속도를 AI 강화학습으로 3배 끌어올린 실적이 있습니다(IEEE Spectrum 보도). UMV는 같은 기술 철학 — 단순한 하드웨어 + 고도화된 AI — 을 극단적으로 밀어붙인 결과물입니다.
논문(arXiv: 2602.22118)은 MIT와 카네기멜론대학교 연구자들이 공동 저자로 참여했으며, 공개 라이선스(CC BY 4.0)로 누구나 읽을 수 있습니다.
로봇 공학의 미래 — AI가 하드웨어를 대체한다
최근 로봇 업계는 두 갈래로 나뉘고 있습니다. 한쪽은 테슬라 옵티머스처럼 사람과 똑같은 형태를 추구하고, 다른 쪽은 UMV처럼 용도에 최적화된 단순한 형태를 택합니다. UMV가 보여주는 교훈은 분명합니다 — AI가 충분히 똑똑하면, 하드웨어는 단순해도 됩니다.
UMV처럼 스스로 학습하고 판단하는 AI를 에이전틱 AI(Agentic AI)라고 부릅니다. 이 개념이 궁금하다면 에이전틱 AI 개념 가이드에서 기초부터 확인할 수 있습니다.
23.5kg짜리 자전거가 공중제비를 도는 영상은 RAI 연구소 공식 영상 페이지에서 확인할 수 있습니다.
관련 콘텐츠 — Easy클코로 AI 시작하기 | 에이전틱 AI란? | 무료 학습 가이드 | AI 뉴스 더보기