디즈니·구글·엔비디아가 함께 만든 AI 로봇 시뮬레이터가 무료 오픈소스입니다
디즈니 연구소, 구글 딥마인드, 엔비디아 3사가 함께 만든 GPU 가속 로봇 물리 시뮬레이션 엔진 Newton이 리눅스 재단 프로젝트로 공개됐습니다. pip 한 줄로 설치, 55개 이상 예제 포함, GTC 2026에서 공식 교육 세션 진행.
AI 로봇이 실제 세상에 나오기 전에 가상 세계에서 수백만 번 연습합니다. 걷기, 물건 잡기, 넘어져도 다시 일어나기 — 이런 훈련을 하려면 현실과 똑같이 물리 법칙이 적용되는 가상 공간이 필요합니다. 디즈니 연구소, 구글 딥마인드, 엔비디아 세 회사가 힘을 합쳐 바로 그 가상 공간을 만드는 도구 Newton을 무료 오픈소스로 공개했습니다.
- 3대 기업 협업 — 디즈니 연구소 + 구글 딥마인드 + 엔비디아가 공동 개발, 리눅스 재단이 관리
- GitHub 스타 2,800개, 커밋 1,563회, 55개 이상 시뮬레이션 예제 내장
- pip install newton 한 줄이면 설치 완료 — 파이썬 3.10 이상, 엔비디아 GPU 권장
- GTC 2026(3월 16~19일)에서 공식 튜토리얼 세션 진행 — 지금 바로 따라할 수 있습니다
왜 세 거대 기업이 로봇 시뮬레이터를 함께 만들었을까
로봇이 실제 환경에서 작업하려면, 먼저 가상 환경에서 충분히 훈련해야 합니다. 이 과정을 '시뮬레이션 기반 훈련'이라고 합니다. 문제는 현실의 물리 법칙(중력, 마찰, 충돌)을 정밀하게 재현하는 시뮬레이터가 대부분 비싸거나 특정 기업에 종속돼 있었다는 점입니다.
Newton은 이 문제를 풀기 위해 만들어졌습니다. 디즈니 연구소는 캐릭터 애니메이션과 천(cloth) 시뮬레이션 전문성을, 구글 딥마인드는 AI 에이전트 훈련 노하우를, 엔비디아는 GPU 가속 기술을 각각 가져왔습니다. 그리고 이 결과물을 리눅스 재단 산하 프로젝트로 공개해, 어떤 기업도 독점할 수 없게 만들었습니다.
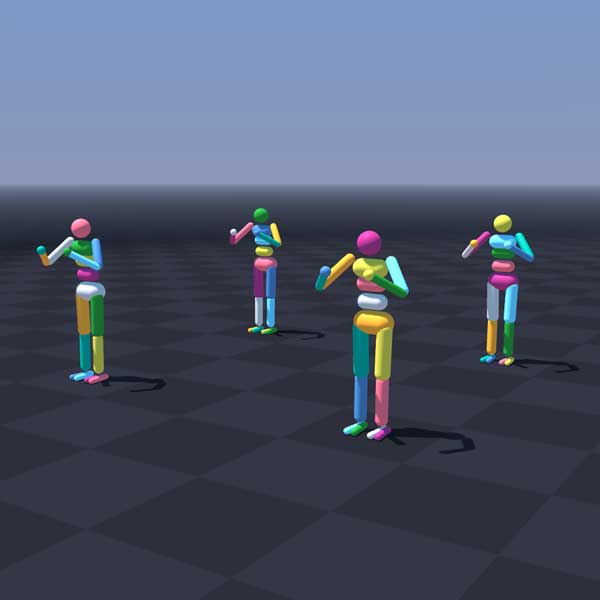
Newton 시뮬레이터 안에서 다양한 자세를 취하는 휴머노이드(인간형) 로봇들. 물리 법칙이 그대로 적용돼 자연스러운 움직임을 학습합니다.
내 컴퓨터에서 로봇을 돌려볼 수 있다
Newton의 가장 큰 장점은 접근성입니다. 파이썬 패키지 매니저(pip)로 설치하면 끝입니다.
# 예제 포함 설치
pip install "newton[examples]"
# 진자 시뮬레이션 바로 실행
python -m newton.examples basic_pendulum
# 휴머노이드 로봇 시뮬레이션
python -m newton.examples robot_humanoid
엔비디아 GPU(Maxwell 세대 이상)가 있으면 GPU 가속으로 빠르게 실행됩니다. Mac 사용자도 CPU 모드로 사용할 수 있습니다. 55개 이상의 예제가 기본 포함돼 있어, 설치 직후 바로 로봇 시뮬레이션을 체험할 수 있습니다.
로봇부터 옷감까지 — 55가지 시뮬레이션 예제
Newton이 시뮬레이션할 수 있는 범위는 놀라울 정도로 넓습니다.
인간형 로봇, 4족 보행 로봇, 산업용 로봇팔, 로봇 손 등 10종의 로봇 모델이 내장돼 있습니다. 걷기, 물건 잡기, 균형 잡기 등을 시뮬레이션합니다.
옷감이 바람에 펄럭이고, 로봇이 천을 접고, 카드가 테이블 위에서 미끄러지는 것까지 재현합니다.
"저 위치에 물건을 놓아라"라는 목표만 주면, 로봇이 어떻게 팔을 움직여야 하는지 스스로 계산합니다.
모래, 흙, 곡물 같은 알갱이 물질이 쏟아지고 쌓이는 것을 GPU로 빠르게 시뮬레이션합니다.

인간 모델 위에 스웨터가 물리적으로 시뮬레이션됩니다. 디즈니 연구소의 천 시뮬레이션 기술이 적용됐습니다.
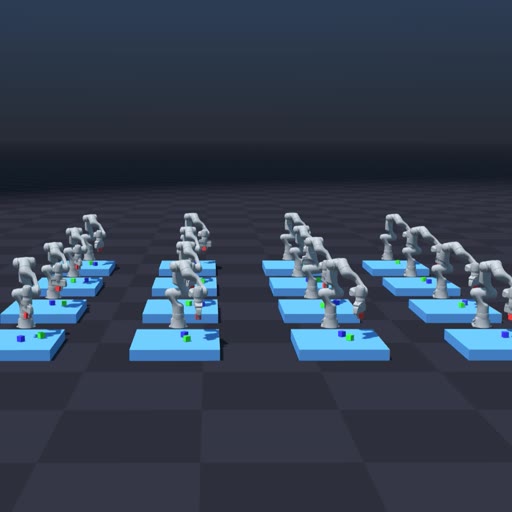
여러 로봇팔이 동시에 블록을 쌓는 훈련을 합니다. GPU 가속 덕분에 수십 개의 로봇을 병렬로 훈련시킬 수 있습니다.
GTC 2026에서 공식 교육 세션이 열렸다
Newton은 이번 주 열린 엔비디아 GTC 2026(3월 16~19일)에서 공식 튜토리얼 세션을 진행했습니다. "Newton Tutorial and Training Lab"이라는 이름으로, 참가자들이 직접 Newton을 설치하고 로봇 시뮬레이션을 실행해보는 핸즈온 교육이었습니다.
이번 GTC에서 엔비디아는 물리적 AI(Physical AI)를 핵심 주제로 내세웠습니다. 디즈니와의 로봇 협업, 삼성·폭스콘 공장 자동화, 그리고 Newton 같은 시뮬레이션 인프라가 모두 같은 방향을 가리킵니다 — AI가 디지털 세계에서 충분히 연습한 뒤 물리적 세계로 나오는 시대입니다.
기존 시뮬레이터와 무엇이 다른가
로봇 물리 시뮬레이터는 이미 여러 개 있습니다. 구글의 MuJoCo, 메타의 PyBullet, 엔비디아의 Isaac Sim 등이 대표적입니다. Newton이 이들과 다른 점은 세 가지입니다.
① 미분 가능한 물리(Differentiable Physics) — AI가 시뮬레이션 결과를 보고 "어떻게 하면 더 잘할 수 있을까"를 스스로 계산할 수 있습니다. 기존 시뮬레이터에서는 별도 작업이 필요했던 기능입니다.
② 멀티 피직스(Multi-Physics) — 딱딱한 물체, 부드러운 물체, 천, 케이블, 알갱이 등 다양한 물질을 하나의 시뮬레이션 안에서 동시에 처리합니다. 실제 세상처럼 로봇이 천을 잡고, 모래 위를 걷는 상황을 재현할 수 있습니다.
③ 특정 기업에 종속되지 않음 — 리눅스 재단 프로젝트이므로, 어떤 회사가 갑자기 유료로 전환하거나 중단할 위험이 없습니다. Apache 2.0 라이선스(상업적 사용 자유)입니다.
누가 Newton을 써야 할까
로봇 공학 연구자·학생이라면 지금 바로 설치해볼 가치가 있습니다. 기존에 MuJoCo나 PyBullet을 쓰고 있었다면, Newton의 GPU 가속과 미분 가능 물리가 훈련 속도를 크게 높여줄 수 있습니다.
AI 엔지니어라면 강화학습(AI가 시행착오를 통해 스스로 학습하는 방법) 환경으로 Newton을 활용할 수 있습니다. 55개 이상의 예제가 이미 준비돼 있어, 환경 구축에 드는 시간을 아낄 수 있습니다.
일반 독자라면, 이 프로젝트가 보여주는 큰 그림을 주목하시기 바랍니다. 디즈니가 테마파크 로봇을, 구글이 범용 AI 로봇을, 엔비디아가 자율주행과 공장 자동화를 각각 추진하고 있습니다. 이 세 회사가 "로봇 훈련 인프라"를 함께 만들고 무료로 공개했다는 것은, AI 로봇 시대가 훨씬 빠르게 다가오고 있다는 신호입니다.
사용해보기
# 1. 설치 (예제 포함)
pip install "newton[examples]"
# 2. 모든 예제 목록 보기
python -m newton.examples
# 3. 관심 있는 예제 실행 (예: 로봇 G1)
python -m newton.examples robot_g1
# 4. GPU 가속 모드로 실행
python -m newton.examples robot_humanoid --device cuda:0
Newton 공식 문서에서 전체 API와 튜토리얼을 확인할 수 있습니다. GitHub 저장소에서 코드와 이슈를 볼 수 있습니다.
앞으로 어떻게 될까
Newton은 현재 베타 버전(1.1.0.dev0)입니다. 1.0 정식 버전을 향한 로드맵이 공개돼 있으며, 커뮤니티에서는 Unity 게임 엔진 통합, 추가 로봇 모델, 강화학습 프레임워크 연동 등이 논의되고 있습니다.
주목할 점은 이번 GTC에서 엔비디아가 발표한 7종의 새 AI 칩과 Newton이 같은 방향을 가리킨다는 것입니다. AI가 디지털 세계에서 물리 법칙을 배우고, 그 지식을 실제 로봇에 옮기는 "시뮬레이션에서 현실로(Sim-to-Real)" 전략이 점점 구체화되고 있습니다. 디즈니, 구글, 엔비디아가 이 기반 기술을 무료로 공개한 것은, AI 로봇 개발을 민주화하겠다는 강력한 의지 표현입니다.
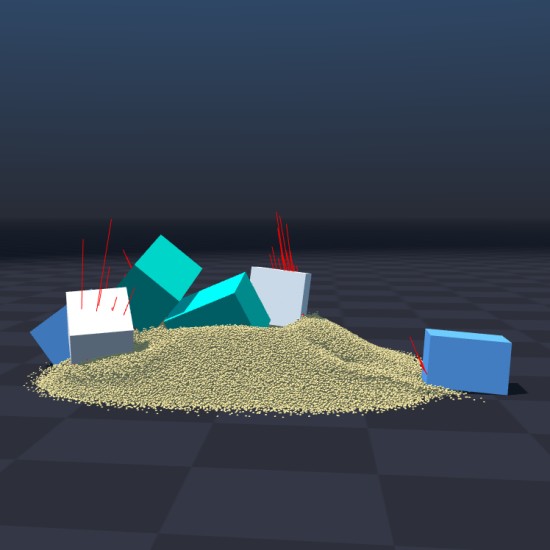
블록이 모래 위에 떨어지면서 상호작용하는 알갱이 물리 시뮬레이션. 실제 건설·농업 로봇 훈련에 활용됩니다.
관련 콘텐츠 — Easy클코로 AI 시작하기 | 무료 학습 가이드 | AI 뉴스 더보기